Reactive is essential for intelligent robots to handle the physical interactions during the manipulation. To be reactive, the robot should be prepared with close integration of end-effector design, perception, planning and control algorithms, for all of which the insights from contact mechanics and dynamics are critical. The MPI Lab brings those disciplines together, to equip robots the capability of understanding, sensing and controlling the contact with the real world.
The MPI Lab value focus, innovation and collaboration, striving to provide an inclusive and supportive environment for all students with diverse backgrounds. Our lab members are expected to cooperate and share their expertise to help each other grow. We look forward to seeing elegant ideas crystalize, sparkle and impact the field, alongside with our lab members grow into independent researchers.
Recent News
2022/12/02
Finally, our website comes online. Several graduate students have joined the lab during the past 1 and half years. They are Jin Liu, Hexi Yu, Li Chen, Haonan Zhao and Can Zhao. Welcome!.
2021/06/03 ICRA
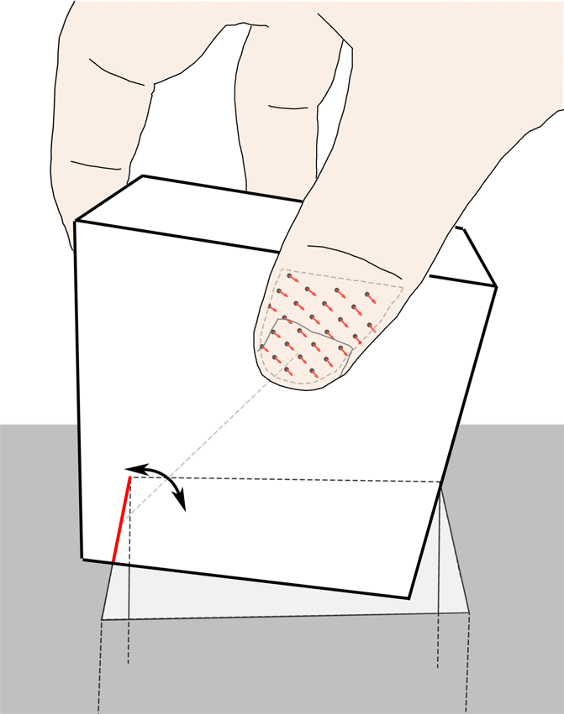
Our Paper "Extrinsic Contact Sensing with Relative-Motion Tracking from Distributed Tactile Measurements" is awarded the IEEE 2021 ICRA Best Conference Paper Award. more. pdf
2021/05/16 T-RO
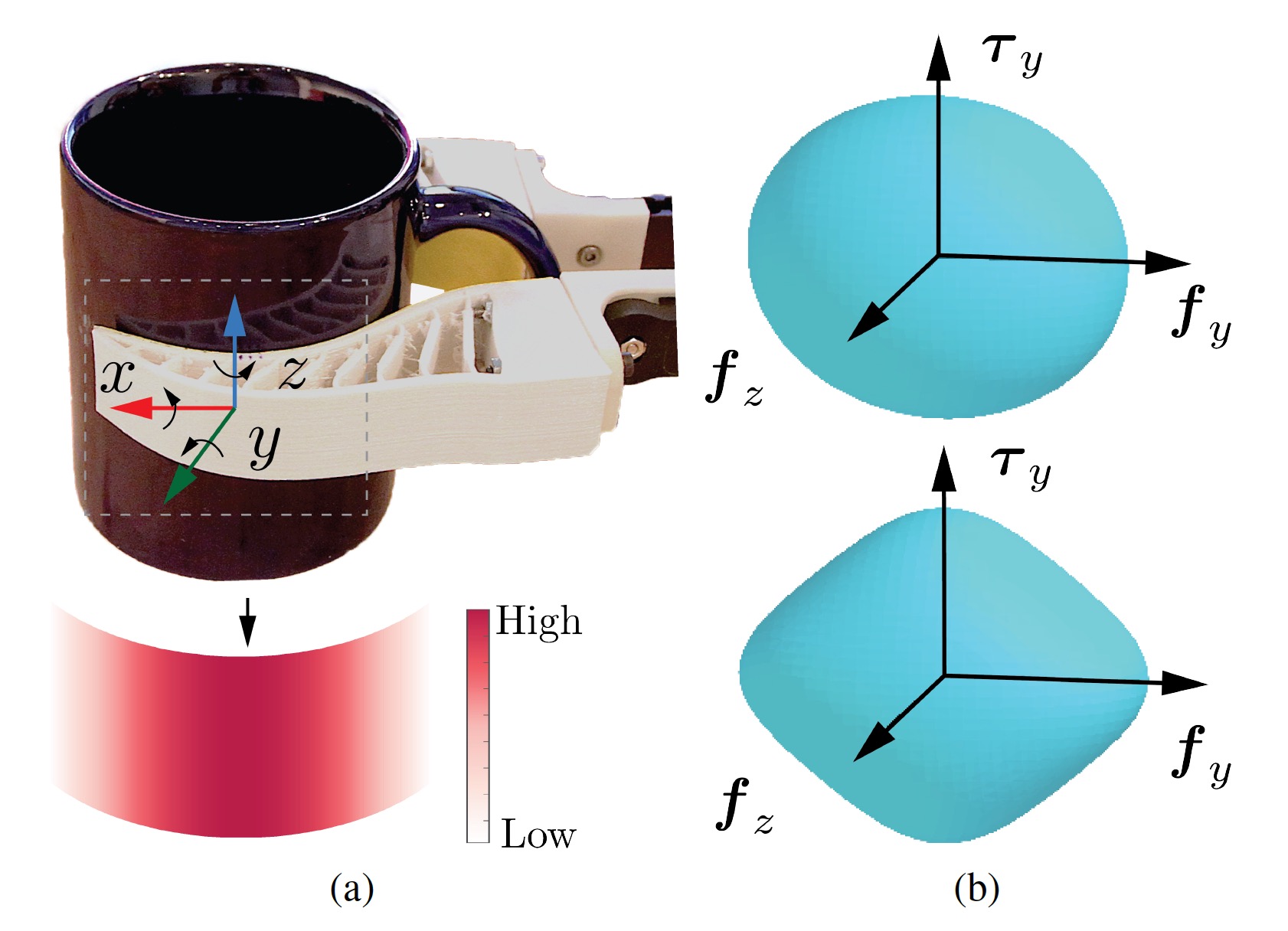
Our Paper "6DLS: Modeling Nonplanar Frictional Surface Contacts for Grasping using 6D Limit Surfaces" is accepted by T-RO. pdf.
2021/02/28 ICRA
2021/02/28 Lab Starts!

02/2021: Our lab starts at the Shanghai Jiao Tong University.